



通過歐姆龍獨創(chuàng)的HSDR-CMOS(High Speed and Dynamic Range)圖像傳感器的采用和激光電源的無級調(diào)節(jié)算法,對金屬以及基板、橡膠、透明物體等在任意顏色、表面狀態(tài)下都能夠進(jìn)行穩(wěn)定測量。以線性度±0.05~0.3%F.S.實現(xiàn)±10~30μm量級檢測。*1
智能傳感器 激光CMOS型 ZX2

智能傳感器 激光CMOS型 ZX2
穩(wěn)定測量,不受工件變化的影響。任何人都能輕松設(shè)定。
聯(lián)系購買
“任何工件都想使用10μm高精度測量時”
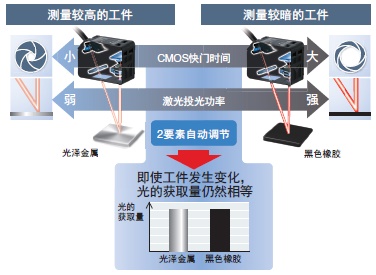
顏色、材質(zhì)發(fā)生改變,工件出現(xiàn)移動,仍能夠進(jìn)行穩(wěn)定測量的動態(tài)范圍200萬倍的CMOS【已獲得專利】*2
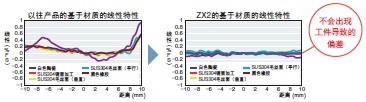
即使工件的顏色、材質(zhì)發(fā)生變化,仍能夠穩(wěn)定的測量
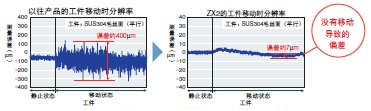
即使工件移動,仍能夠穩(wěn)定測量
針對表面粗糙的工件,通過投光光束采用線性光束的方式,實現(xiàn)了反射光量的平均化,以測量周期30μs高速修正受光量,來降低工件移動所產(chǎn)生的受光量變動,即使工件發(fā)生移動,也能夠?qū)崿F(xiàn)穩(wěn)定測量。
*1 分辨率、角度特性、測量范圍、線性度、光點直徑等的額定規(guī)格/性能因機型而異。詳情請確認(rèn)“額定規(guī)格/性能”。
線性表示測量本公司標(biāo)準(zhǔn)對象物體時,相對于變位輸出理想直線的誤差。線性度及測量值因?qū)ο笪矬w而異。實際使用時,請事先通過實際設(shè)備進(jìn)行確認(rèn)。
任何人都能夠設(shè)定成最佳狀態(tài)
1個按鈕即可輕松選擇的智能調(diào)諧【已獲得專利】*2
不信賴于使用人員的個人技巧,只需1個智能調(diào)諧按鈕,實現(xiàn)了穩(wěn)定測量所需的最佳設(shè)定。

根據(jù)工件進(jìn)行選擇的3種調(diào)諧
使用可根據(jù)要測量工件的種類、表面狀態(tài)進(jìn)行選擇3種調(diào)諧方法,能夠進(jìn)行更準(zhǔn)確的設(shè)定。
單工件智能調(diào)諧
穩(wěn)定檢測1種工件時,只需按1秒按鈕,就能夠進(jìn)行最佳設(shè)定

多工件智能調(diào)諧
對多工件進(jìn)行穩(wěn)定檢測時,按住按鈕3秒,就能夠進(jìn)行最佳設(shè)定

主動智能調(diào)諧
對所有部位進(jìn)行穩(wěn)定檢測時,只需長按5秒按鈕,進(jìn)行連續(xù)調(diào)諧,就能夠進(jìn)行最佳設(shè)定
*2 “已取得專利”標(biāo)記表示已在日本獲得專利。(截至2019年10月)
即使在惡劣環(huán)境下,也能夠放心測量
保護(hù)結(jié)構(gòu)IP67&機器人電纜&溫度特性0.02%F.S./°C
能夠在惡劣環(huán)境下使用的保護(hù)結(jié)構(gòu)IP67。此外,檢測頭電纜及延長電纜標(biāo)配機器人電纜,因此,即使在可動部位也能夠放心使用。而且,光部件的固定采用了三維UV粘接,非螺絲固定,因此,能夠抑制應(yīng)力,實現(xiàn)0.02%F.S./°C*的溫度特性。

*若室溫發(fā)生1℃的變化,則測量值會變化0.02%F.S.(ZX2-LD5時,相當(dāng)于4μm)。
提升了安裝到裝置的自由度
世界最小*
采用樹脂外殼,實現(xiàn)了CMOS激光位移動傳感器的探測頭的世界最小尺寸。在狹小的空間內(nèi)也能夠進(jìn)行安裝。此外,光學(xué)底座采用壓鑄方式,降低了溫度變化可能導(dǎo)致的測量溫度。

*數(shù)據(jù)來自2010年9月本公司關(guān)于CMOS激光位移傳感器的調(diào)查報告
無需手冊,操作簡單
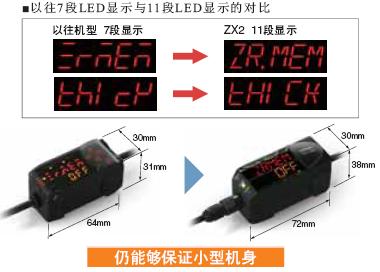
11段LED顯示
在實現(xiàn)小型機身的同時,采用了11段LED顯示。能夠輕松讀取英文字母及數(shù)字,無需查閱手冊。

輕松實現(xiàn)2個運算合一
厚度+減少模式
只要把運算單元連接到放大器之間,就可以將2臺傳感器的測量值運算結(jié)果顯示在一側(cè)的放大器上。
此外,只需使用運算單元進(jìn)行合并,就能夠防止相互干擾。(最多5臺)

能夠簡單舍地更改設(shè)定條件
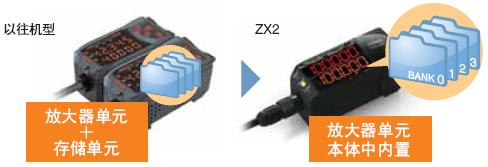
內(nèi)置4個BANK
放大器單元本題中內(nèi)置4個BANK功能。只需切換BANK功能,就能夠輕松應(yīng)對4種模式的產(chǎn)品更換。
下一個:
2D CMOS激光型 ZS-L
